6. Upphafsgildisverkefni
In the beginning there was nothing, which exploded. – Terry Pretchett
6.1. Inngangur
6.1.1. Fyrsta stigs afleiðujafna með upphafsgildi
Gefið fall \(f\) á einhverju svæði \(U\) í \(\mathbb{R}^2\) sem inniheldur \((t_0,x_0)\) þá er fyrsta stigs afleiðujafna með upphafsgildi verkefni á forminu
Við segjum að fall \(x(t)\) sé lausn á þessu verkefni ef \(x\) er skilgreint á bili \(I\), sem er þannig að
\(t_0 \in I\),
\((t,x(t)) \in U\) fyrir öll \(t \in I\),
\(x'(t) = f(t,x(t))\) fyrir öll \(t \in I\), og
\(x(t_0) = x_0\).
6.1.2. Útskýring og dæmi
Ástæðan fyrir því að við notum \(t\) fyrir breytuna og \(x\) fyrir fall hér, er að breytan \(t\) lýsir oft tíma og lausnin getur þá t.d. verið staðsetning sem fall af tíma.
Eðlilegt er að hugsa um afleiðujöfnuna þannig að fallið \(f\) geymi upplýsingar um þau lögmál sem kerfið að hagar sér eftir, upphafsskilyrðið \(x(t_0)=x_0\) segir í hvaða stöðu kerfið er þegar það er sett af stað og lausnin \(x(t)\) lýsir hegðun kerfisins með tíma.
Í upphafi námskeiðsins, dæmi 1.2, skoðuðum við dæmi um eldflaug sem skotið er á loft. Þar er notum við reyndar \(v\) í stað \(x\) því jafnan lýsir hraða (e. velocity) en ekki staðsetningu. Jafnan var
Hér er því \(f(t,v) = \frac{5000-(300-10t)g-0,1v^2+10v}{300-10t}\), \(t_0=0\) og \(x_0 = 0\).
6.1.3. Tilvist og ótvíræðni lausna
Ef \(f\) er samfellt, þá er alltaf til lausn á einhverju bili \(I\). (Setning Peano)
Ef \(f\) uppfyllir Lipschitz-skilyrði með tilliti til \(x\), þ.e.a.s. til er fasti \(C\) þannig að
fyrir öll \((t,x_1)\) og \((t,x_2)\) í grennd um \((t_0, x_0)\) þá er lausnin ótvírætt ákvörðuð. (Setning Picard)
6.1.4. Upphafsgildisverkefni fyrir hneppi
Með því að nota vigra og vigurgild föll má útfæra upphafsgildisverkefni fyrir hneppi:
þar sem
Athugið að við skrifum \({\mbox{${\bf x}$}}(t)\) og \({\mbox{${\bf f}$}}(t,{\mbox{${\bf x}$}})\) sem dálkvigra,
6.1.5. Jöfnur af stigi \(>1\) og jafngild hneppi
Aðferðirnar sem við munum skoða eru eingöngu fyrir fyrsta stigs afleiðujöfnur, sem þýðir að jöfnurnar sem við leysum innihalda bara \(x'\) en ekki \(x'',x''',\ldots\). Hins vegar þá getum við leyst afleiðujöfnur af hærra stigi með því að umrita þær yfir í jafngilt fyrsta stigs hneppi.
Ef við höfum \(m\)-stigs diffurjöfnu
þar sem \(g\) er gefið fall og \(t_, u_0, \ldots , u_{m-1}\) eru gefnar tölur þá er jafngilt hneppi er fengið með því að setja
Þá fæst hneppið
með upphafsskilyrðið \({\bf x}(t_0)^T = [u_0,u_1,u_2,\ldots,u_m]^T\).
Fyrsta hnitið í lausn hneppisins, \(x_1\), gefur þá lausn, \(u\) á upprunalegu \(m\)-ta stigs afleiðujöfnunni.
6.1.6. Tilvist og ótvíræðni lausna á hneppum
Tilvistar- og ótvíræðnisetningar Peanos og Picards eru þær sömu fyrir hneppi
Við þurfum bara að setja norm \(\|\cdot\|\) í stað tölugildis \(|\cdot|\) í öllum ójöfnum og þar með talið í Lipschitz-skilyrðinu.
6.1.7. Ritháttur
Til einföldunar á rithætti skulum við skrifa lausnarvigurinn \({\mbox{${\bf x}$}}\) og vörpunina \({\mbox{${\bf f}$}}\) sem \(x\) og \(f\) og láta eins og við séum að leysa fyrsta stigs afleiðujöfnu.
Við veljum gildi \(t_0 < t_1 < \cdots < t_j<\cdots\) og reiknum út nálgunargildi \(w_j\) á gildi lausnarinnar \(x(t_j)\) í punktinum \(t_j\). Gildið \(w_0=x(t_0)\) er rétta upphafsgildi lausnarinnar
Talan \(t_j\) kallast \(j\)-ti tímapunkturinn og talan \(h_j=t_j-t_{j-1}\) nefnist \(j\)-ta tímaskrefið.
Skekkjan á tíma \(t_j\) er þá \(e_j = x(t_j)-w_j\).
6.1.8. Grunnhugmyndin í nálgunaraðferðum
Ef við heildum lausn afleiðujöfnunnar yfir tímabilið \([t,t+h]\), þá fáum við að hún uppfyllir jöfnuna
Ef við setjum \(t=t_{j-1}\) inn í þessa jöfnu, þá fáum við
Nálgunaraðferðirnar snúast allar um að gera einhvers konar nálgun á heildinu í hægri hliðinni
og leysa síðan \(w_j\) út úr jöfnunni
6.1.9. Beinar og óbeinar aðferðir
Nálgunaraðferð sem byggir á jöfnunni
er nefnist bein aðferð (e. explicit method) ef \(w_j\) kemur ekki fyrir í í hægri hliðinni.
Annars nefnist hún óbein aðferð eða fólgin aðferð (e. implicit method).
Ef aðferðin er bein og við höfum reiknað út \(w_0,\dots,w_{j-1}\), þá fáum við rakningarformúlu, þannig að \(w_j\approx x(t_j)\) er reiknað út
6.1.10. Eins skrefs aðferðir og fjölskrefaaðferðir
Nálgunaraðferð sem byggir á jöfnunni
er nefnist eins skrefs aðferð (e. one step method) og er þá vísað til þess að fallið í hægri hliðinni er einungis háð gildum á síðasta tímaskrefinu.
er af gerðinni
Almennt er \(k\) -skrefa aðferð af gerðinni
Fjölskrefaðferð er \(k\)-skrefa aðferð með \(k\geq 2\).
6.2. Aðferðir með fasta skrefastærð
6.2.1. Aðferð Eulers
Rifjum upp að lausnin uppfyllir
Billengdin í síðasta heildinu er \(1\), svo við tökum einföldustu nálgum sem hugsast getur en það er gildið í vinstri endapunkti \(f(t,x(t))\). Fyrir lítil \(h\) fæst því
Við þekkjum \(w_0=x(t_0)\), svo með þessu getum við fikrað okkur áfram og fengið runu nálgunargilda \(w_0, w_1, w_2, \ldots\) þannig að
6.2.2. Aðferð Eulers: Matlab-forrit
function w = euler(f,t,alpha);
% function w = euler(f,t,alpha)
% Aðferð Eulers fyrir afleiðujöfnuhneppi
% x'(t)=f(t,x(t)), x(0)=alpha.
% Inn fara: f - fallið f
% t - vigur með skiptingu á t-ás.
% alpha - upphafsgildið í t(1).
% Út koma: w - fylki með nálgunargildunum.
N = length(t);
m = length(alpha);
w = zeros(m,N);
w(:,1) = alpha;
for j=2:N
w(:,j) = w(:,j-1)+(t(j)-t(j-1))*f(t(j-1),w(:,j-1));
end
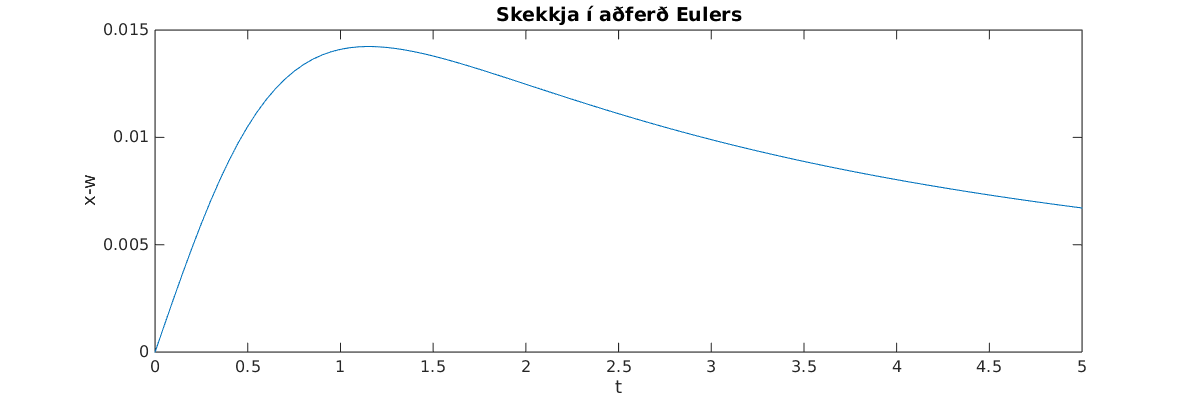
6.2.3. Aðferð Eulers: Dæmi
Prófum aðferð Eulers á afleiðujöfnunni
Við sjáum að rétt lausn er \(x(t) = \sqrt{t^2+ 1}\).
Notum 101 jafndreifð tímagildi á bilinu [0,5]. Þá er skekkjan
>> f = @(t,x) t./x;
>> t=linspace(0,5,101);
>> w=euler(f,t,1);
>> plot(t,sqrt(t.^2+1) - w)
>> title('Skekkja í aðferð Eulers'); xlabel('t'); ylabel('x-w');
6.2.4. Endurbætt aðferð Eulers
Í aðferð Eulers nálguðum við heildið \(\int_0^1 f(t+sh,x(t+sh))\, ds\) með margfeldi af billengdinni og fallgildinu í vinstri endapunkti.
Við getum endurbætt þessa nálgun með því að taka einhverja nákvæmari tölulega nálgun á heildinu til dæmis miðpunktsaðferð
Nálgunarformúlan verður þá
Nú er vandamálið að við höfum nálgað \(x(t_{j-1})\) með \(w_{j-1}\) en höfum ekkert nálgunargildi á \(x(t_{j-1}+\frac 12 h_j)\).
Við grípum þá til fyrsta stigs Taylor nálgunar
Endurbætt aðferð Eulers er þá í tveim skrefum; við reiknum
og fáum svo nálgunargildið
6.2.5. Aðferð Heun
Lítum nú á aðra aðferð þar sem við nálgum heildið með trapisuaðferð.
Af þessu leiðir að nálgunarformúlan á að vera
Þetta er greinilega óbein aðferð svo við verðum að byrja á nálgun á \(w_j\), með
Þetta nýja afbrigði af aðferð Eulers nefnist aðferð Heun. Hún er í tveim skrefum: Við reiknum fyrst
og fáum svo nálgunargildið
6.2.6. Forsagnar- og leiðréttingarskref
Endurbætt aðferð Eulers og aðferð Heun eru leiðir til þess að vinna úr óbeinum aðferðum, þar sem rakningarformúlan fyrir nálgunargildin er af gerðinni
og okkur vantar eitthverja nálgun á \(w_j\) til þess að stinga inn í hægri hlið þessarar jöfnu. Við skiptum þessu tvö skref:
Við beitum einhverri beinni aðferð til þess að reikna út
Setjum
Svona aðferðir kallast Runge-Kutta aðferðir. Fyrra skrefið, þegar \(\tilde w_j\) er reiknað út kallast forsagnarskref og seinna skrefið kallast leiðréttingarskref.
6.2.7. Annars stigs Runge-Kutta-aðferð
Lítum aftur á verkefnið
og skoðum 2. stigs Taylor liðun á lausninni \(x\) í punkti \(t\). Innleiðum fyrst smá rithátt til styttingar, setjum
Keðjureglan gefur
Taylor-liðun lausnarinnar er
Nú sjáum við að síðasti liðurinn er 1. stigs Taylor liðun \(f\) með miðju \((t,x)\) skoðuð í punktinum \((t+h,x+hf)\), því
og þar með er
Þessi formúla liggur til grundvallar 2. stigs Runge-Kutta-aðferð: Með henni fáum við nálgunarrunu \(w_0, w_1, w_2, \ldots\) þannig að \(w_0=x(0)\) og
þar sem
og eins og alltaf er \(w_j \approx x(t_j)\).
6.2.8. Klassíska (fjórða stigs) Runge-Kutta aðferðin
Algengasta Runge-Kutta aðferðin er klassíska Runge-Kutta aðferðin. Þetta er fjórða stigs aðferð, sem þýðir að staðarskekkjan er \(O(h^5)\) og heildarskekkjan er \(O(h^4)\), .
þar sem
Ef \(f(t,x)\) er bara fall af \(t\), þ.e. óháð \(x\), þá svarar þetta til þess að meta heildið \({\varphi}\) með Simpson-reglunni.
6.2.9. Klassíska Runge-Kutta aðferðin: Dæmi
Skoðum nú sama dæmi og þegar við prófuðum aðferð Eulers.
Þá gefa eftirfarandi skipanir mynd af skekkjunni.
>> f = @(t,x) t./x;
>> [w,t]=rk4(f,0,1,5,100);
>> plot(t,sqrt(t.^2+1) - w)
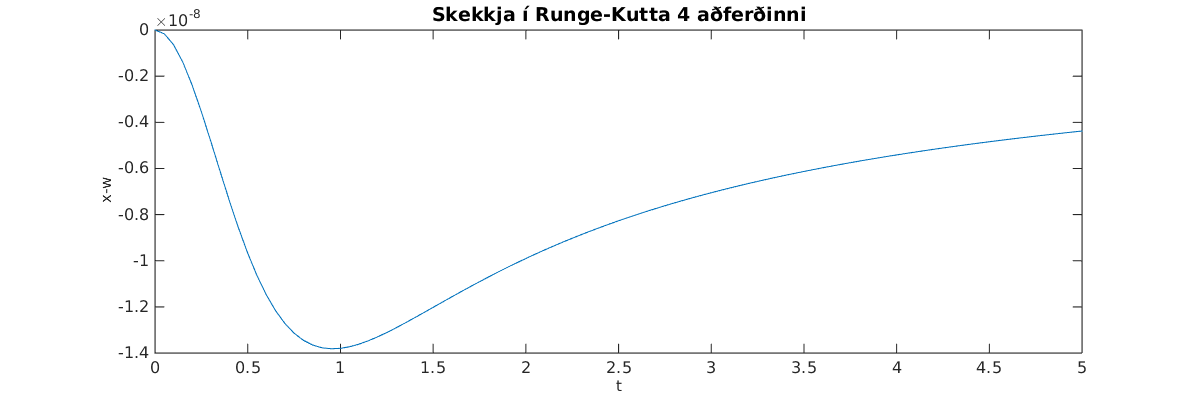
Þetta er töluvert betra en aðferð Eulers sem skilaði skekkju af stærðargráðunni \(10^{-2}\).
6.3. Skekkjumat, samleitni og stöðugleiki
+++Mr. Jelly! Mr. Jelly!+++
+++Error At Address: 14, Treacle Mine Road, Ankh-Morpork+++
+++MELON MELON MELON+++
+++Divide By Cucumber Error. Please Reinstall Universe And Reboot +++
+++Whoops! Here Comes The Cheese! +++
+++Oneoneoneoneoneoneone+++
–villuskilaboð tölvunnar Hex í Interesting Times eftir Terry Pratchett
6.3.1. Skekkja
Fyrir eins skrefs aðferð skilgreinum við staðarskekkju við tímann \(t_n\) sem
Hér er réttu lausninni stungið inn í nálgunarformúluna. Munum að hún uppfyllir
Viljum geta metið \(\tau_n\) sem fall af \(h_n\), t.d.
Almennt batna aðferðir eftir því sem veldisvísirinn \(k\) í staðarskekkjunni verður stærri.
Staðarskekkja er hlutfallsleg skekkja við að fara úr \(w_{n-1}\) yfir í \(w_n\). Einnig má skoða uppsafnaða skekkju frá upphafstímanum \(t_0\), hún er skilgreind með \(e_n = x(t_j)-w_j\) og kallast heildarskekkja.
6.3.2. Staðarskekkja í aðferð Eulers
Aðferð Eulers er sett fram með formúlunni
Staðarskekkjan er því
Aðferð Eulers er því fyrsta stigs aðferð.
6.3.3. Stýring á staðarskekkju og breytileg skrefastærð
Hingað til þá höfum við ekki fengið neinar upplýsingar til að finna heppilegustu skrefastærð. Eftir því sem skrefastærðin er minni er staðarskekkjan sennilega minni, en þá komumst við hægar yfir og það er hætta á að heildarskekkjan hækki við að taka mörg skref. Í Aðferðir með breytilega skrefastærð munum við reyna að stilla skrefastærðina þannig að við tökum eins stór skref og mögulegt en þó þannig að staðarskekkjan sé ekki of há. Þá munum við þurfa eftirfarandi útleiðslu.
Hugsum okkur að við höfum tvær beinar nálgunaraðferðir
og
Skilgreinum tilsvarandi staðarskekkjur
og
þar sem \(\alpha_2>\alpha_1\). Við tímann \(t_{n-1}\) hafa nálgunargildin \(w_0,\ldots,w_{n-1}\) hafi verið valin samkvæmt fyrri aðferðinni.
Meiningin að velja næsta tímapunkt \(t_n\) og þar með tímaskref \(h_n\) þannig að \(\tau_n(h_n)\leq \delta\), en að \(\tau_n(h_n)\) haldi sig sem næst \(\delta\), þar sem \(\delta\) er gefið efra mark á staðarskekkjunni í fyrri aðferðinni.
Stærðin \(\delta\) er kölluð þolmörk (e. tolerance) fyrir staðarskekkjuna og er oft táknuð með \(TOL\).
Við byrjum á að setja \(h=h_{n}\) inn í báðar aðferðirnar og bera útkomurnar saman
Við látum \(\hat w_{n}\) tákna rétt gildi lausnarinnar á upphafsgildisverkefninu
\(x'(t)=f(t,x(t))\),
\(x(t_{n-1})=w_{n-1}\),
í punktinum \(t_{n-1}+h\).
Þá höfum við
og eins fæst
Nú tökum við mismuninn og skilgreinum
Munum að hér er skreflengdin \(h=h_{n}\). Þessi nálgunarformúla gefur okkur möguleika á því að meta fastann
6.3.4. Mat á skrefastærð
Segjum nú að við viljum halda staðarskekkjunni innan markanna \(\delta/2\) og hafa skreflengdina í næsta skrefi \(h_{n}=qh_{n-1}\), þá höfum við nálgunarjöfnuna
Við tökum
veljum síðan skrefstærðina \(h_n = qh_{n-1}\) og reiknum út næsta gildi
6.4. Aðferðir með breytilega skrefastærð
Dæmi um aðferðir sem notast við breytilega skrefastærð.
Einfaldast væri að nota Heun aðferðina (annars stigs) til að meta skrefastærðina í Euler aðferðinni (fyrsta stigs).
Algengasta aðferðin er Runge-Kutta-Fehlberg (RKF45) sem notar 5. stigs nálgun til þess að meta staðarskekkjuna í 4. stigs aðferð.
Endurbót á RKF45 er Runge-Kutta-Verner (RKV56) sem notar 6. stigs aðferð til að meta skekkjuna í 5. stigs aðferð.
Fleiri aðferðir: Bogacki–Shampine (3. og 2. stigs), Cash–Karp (5. og 4. stigs) og Dormand–Prince (5. og 4. stigs).
6.4.1. Reiknirit fyrir Runge-Kutta-Fehlberg (RKF45)
þar sem
6.4.2. Runge-Kutte-Fehlberg (RKF45) prófuð
Höldum áfram með dæmi sem við beittum aðferð Eulers og klassísku Runge-Kutta hér á undan
Þá gefur eftirfarandi mynd af skekkjunni. Hér er 0.01 minnsta leyfilega skrefastærðin, 0.1 stærsta leyfilega skrefastærðin og þolmörkin eru \(10^{-10}\).
>> f = @(t,x) t./x;
>> [w,t] = rkf45(f,0,1,5,[0.01,0.1,1E-10]);
>> plot(t,sqrt(t.^2+1) - w)
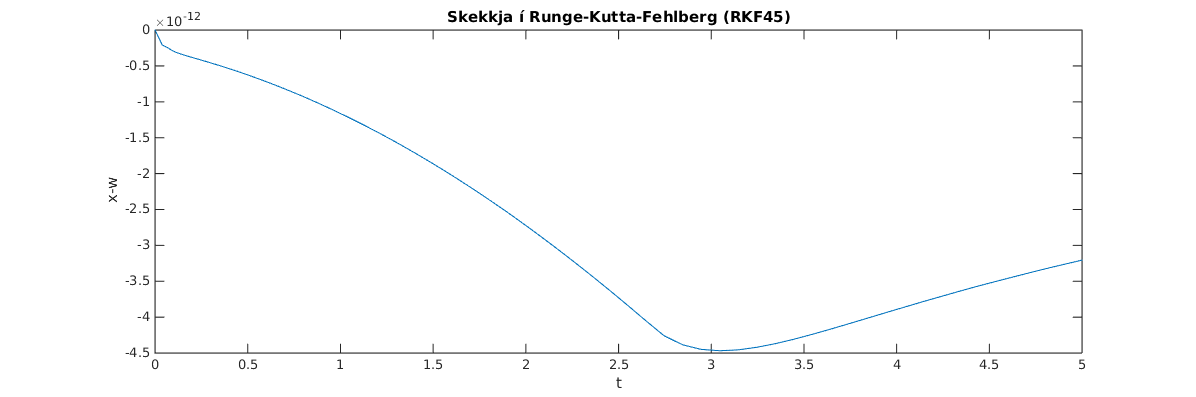
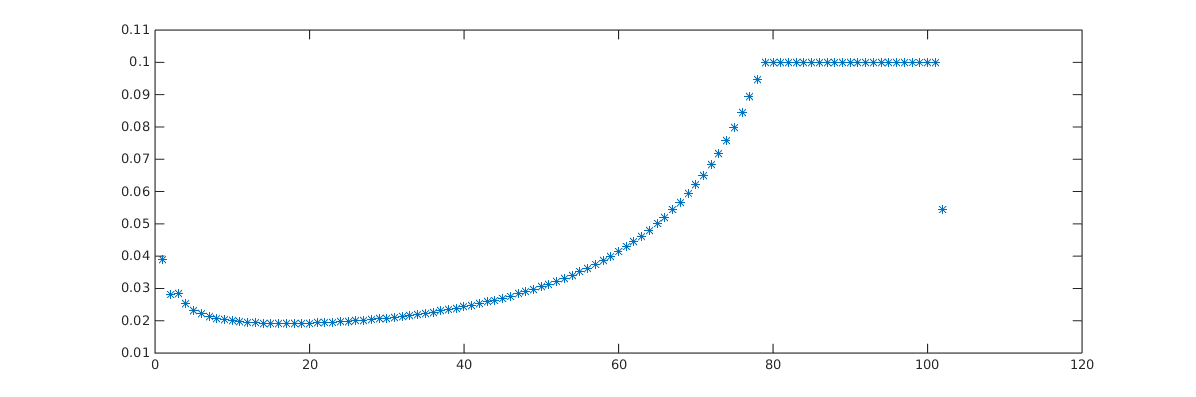
Hér á undan þá notðum við þolmörkin \(10^{-10}\) sem skilaði okkur 103 misstórum tímagildum á bilinu \([0,5]\). Svona getum við teiknað upp stærðina á tímaskrefunum.
>> plot(t(2:end)-t(1:end-1),'*')
6.5. Fjölskrefaaðferðir
Þær aðferðir sem við höfum séð eiga allar sameiginlegt að ákvarða nálgunargildi \(w_{n}\) aðeins út frá gildinu \(w_{n-1}\) næst á undan. Hægt er að nota fleiri gildi \(w_{n-1}\), \(w_{n-2}\), \(\ldots\) og fá þannig betri nákvæmni, en aðferðirnar verða að sama skapi flóknari í notkun.
Eins og alltaf höfum við verkefnið
og viljum nálga gildi lausnarinnar \(x\) á bili \([a,b]\) þar sem \(a =t_0\) eða \(b = t_0\). Látum \(t_0\), \(t_1\), \(\ldots\), \(t_n\) vera skiptingu á bilinu \([a,b]\) og gerum til einföldunar ráð fyrir að hún hafi jafna billengd \(h=t_{j} - t_{j-1}\) fyrir \(j= 1, \ldots, n\).
6.5.1. \(k\)-skrefa Adams-Bashforth aðferð
Við vitum að lausnin \(x\) uppfyllir
Skrifum nú
þar sem
er brúunarmargliðan gegnum punktana \((t_{n-k},x(t_{n-k}))\), \((t_{n+1-k},x(t_{n+1-k}))\), \(\ldots\), \((t_{n-1},x(t_{n-1}))\), þ.e. gegnum síðustu \(k\) punkta á undan \((t_n,x(t_n))\).
Þetta eru \(k\) punktar og því er aðferðin kölluð \(k\)-skrefa aðferð.
Munum að til er \(\xi\) þannig að
Við nálgum nú heildið af \(f\) yfir bilið \([t_{n-1},t_n]\) með heildi \(P_{k-1}\) og fáum
og með beinum útreikningum má sjá að skekkjan í þessari nálgun er \(O(h^{k+1})\). Þessir útreikninga flækjast auðvitað eftir því sem \(k\) stækkar.
Augljóslega getum við ekki notað \(k\) skrefa Adams-Bashforth aðferðir um leið og við sjáum upphafsgildisverkefni, því við þurfum \(k\) ágiskunargildi \(w_0, w_1, \ldots, w_{k-1}\) til að byrja að nota aðferðina. Þessi gildi má fá með hverri sem er af aðferðunum sem við höfum séð hingað til.
Ákveðin sértilfelli Adams-Bashforth aðferðanna eru meira notuð en önnur, það eru tveggja, þriggja og fjögurra skrefa aðferðirnar. Áhugasömum verður ekki skotaskuld úr að leiða út formúlurnar fyrir þær, en við birtum bara niðurstöðurnar.
Til styttingar skilgreinum við \(f_j = f(t_j,w_j)\).
6.5.2. Tveggja skrefa Adams-Bashforth-aðferð
Þegar gildin \(w_{n-1}\) og \(w_{n-2}\) hafa verið fundin fæst næsta nálgunargildi með
og skekkjan í nálguninni er \(O(h^3)\).
6.5.3. Forrit fyrir tveggja skrefa Adams-Bashforth-aðferð
Aðferðin er útfærð í forritinu hér að neðan; það skýrir sig að mestu sjálft en við skulum taka eftir þrennu:
(i) Við krefjumst þess að notandinn gefi nálgunargildi á x(t(2)), þetta gerum við því til eru margar mismunandi aðferðir til að fá slíkt gildi og þær henta mis vel hverju sinni.
(ii) Við gerum ekki sérstaklega ráð fyrir að jafnt bil sé á milli stakanna í vigrinum t þó við höfum gert það hingað til. Það var aðeins gert til að einfalda útreikninga; aðferðin virkar nákvæmlega eins ef það er ekki jafnt bil á milli stakanna, svo sjálfsagt er að forrita hana þannig.
(iii) Við lágmörkum fjölda skipta sem við reiknum gildi f með að geyma alltaf gildið frá síðustu ítrun og nota það aftur, þetta getur sparað nokkurn tíma í útreikningum ef f er flókið fall.
function w = adams_bashforth_2(f,t,x1,x2)
% w = adams{_}bashforth{_}2(f,t,x1,x2)
% Nálgar lausn upphafsgildisverkefnisins
% x' = f(t,x)
% x(t(1)) = x1
% í punktunum í t með 2ja þrepa Adams-Bashforth aðferð.
% Stakið x2 er nálgunargildi á x(t(2)).
N = length(t); M = length(x1); w = zeros(M,N);
% Upphafsstillum gildi f(t,x) og w
fx1 = f(t(1),x1); fx2 = f(t(2),x2);
w(:,1) = x1; w(:,2) = x2;
for i=3:N
% Reiknum nálgunargildi
h = t(i)-t(i-1);
w(:,i) = w(:,i-1) + (h/2)*(3*fx2 - fx1);
fx1 = fx2; fx2 = f(t(i),w(:,i));
end
6.5.4. Þriggja skrefa Adams-Bashforth
Gefin \(w_{n-1}\), \(w_{n-2}\) og \(w_{n-3}\) fæst næsta nálgunargildi með
og staðarskekkjan er \(O(h^4)\)
6.5.5. Fjögurra skrefa Adams-Bashforth
Þegar við þekkjum \(w_{n-1}\), \(w_{n-2}\), \(w_{n-3}\) og \(w_{n-4}\) reiknum við næsta gildi með
og skekkjan í nálguninni er \(O(h^5)\).
6.6. Greining á samleitni og stöðugleika
Lítum aftur á upphafsgildisverkefnið okkar
Við hugsum okkur að nálgun sé fundin í tímapunktunum
Við táknum nálgunargildi á \(x(t_j)\) með \(w_j\). Það er gefið með
þar sem fallið \(\varphi(f,t_{0},\dots,t_n,w_{0},\dots,w_{n})\) er skilgreint með einhverjum hætti.
Við köllum þetta nálgunaraðferðina sem fallið \(\varphi\) gefur af sér.
6.6.1. Skekkja
Skekkja (e. error) eða heildarskekkja (e. total error) í nálgun á \(x(t_n)\) með \(w_n\) er
og staðarskekkja (e. local truncation error) nálgunaraðferðarinnar við tímann \(t_n\) er
Athugasemd
Munið að hér er rétta lausnin sett inn í nálgunaraðferðina.
6.6.2. Samleitni
Hugsum okkur nú að fjöldi tímapunktanna \(N\) stefni á óendanlegt. Við segjum að nálgunaraðferðin \(\varphi\) sé samleitin ef
þar sem \(e_n=x(t_n)-w_n\) táknar skekkjuna í \(n\)-ta tímaskrefinu.
6.6.3. Samræmi
Við segjum að nálgunaraðferðin \(\varphi\) samræmist upphafsgildisverkefninu ef um sérhvern tímapunkt \(t_{n-1}\) gildir að
6.6.4. Samræmi endurbættu Euler-aðferðarinnar
Munum að endurbætta Euler-aðferðin er
sem gefur staðarskekkjuna
Nú hugsum við okkur að \(t_{n-1}\) sé haldið föstu og látum billengdina \(h_n=t_n-t_{n-1}\) stefna á \(0\). Þá fæst
Þetta segir okkur að endurbætta Euler-aðferðin samræmist upphafsgildisverkefninu.
6.6.5. Samræmi beinna eins skrefs aðferða
Þessi röksemdafærla alhæfist á allar beinar eins skrefs aðferðir, því staðarskekkja þeirra er
Nú er eðlilegt að gefa sér að \(\varphi\) sé samfellt fall og þá verður markgildið af staðarskekkjunni
Eins skrefs aðferðin sem fallið \(\varphi\) gefur af sér er því stöðug ef og aðeins ef
6.6.6. Stöðugleiki
Gerum nú ráð fyrir að upphafsgildinu \(w_0\) sé breytt í \(\tilde w_0\) og að \(\tilde x(t)\) uppfylli
Lítum síðan á tilsvarandi nálgunarrunu
Við segjum að nálgunaraðferðin sem \(\varphi\) gefur af sér sé stöðug ef til er fall \(k(t)>0\) þannig að
6.6.7. Lipschitz-samfelldni
Rifjum nú upp að við gerum ráð fyrir að fallið \(f(t,x)\) sé skilgreint á svæði \(D\) sem inniheldur
Við segjum að \(f\) sé Lipschitz samfellt á \(D\) með tilliti til \(x\) ef til er fasti \(C_f\) þannig að
Hugsum okkur að \(\varphi(f,s,t,x)\) sé fall sem gefur af sér beina eins skrefs nálgunaraðferð fyrir upphafsgildisverkefnið \(x'(t)=f(t,x(t))\) með \(x(t_0)=w_0\).
Við segjum að \(\varphi\) sé Lipschitz-samfellt með tilliti til \(x\) ef um sérhvert Lipschitz-samfellt fall \(f\), tölur \(s,t\in [a,b]\) og \(x,y\in {{\mathbb R}}\) gildir að til er fasti \(L_\varphi\) þannig að
6.6.8. Setning um stöðugleika og samleitni
Gefum okkur jafna skiptingu á tímabilinu \([a,b]\), \(t_n=a+nh\), þar sem \(n=0,1,2,\dots,N\) og \(h=(b-a)/N\).
Ef fallið \(\varphi\) er Lipschitz-samfellt með tilliti til \(x\) með Lipschitz-fastann \(L_\varphi\), þá gildir:
Eins skrefs aðferðin sem \(\varphi\) gefur af sér er stöðug,
\[|\tilde w_n-w_n|\leq e^{L_\varphi(t_n-a)}|\tilde w_0-w_0|, \qquad n=1,2,3,\dots.\]Ef til eru fastar \(c\) og \(p\) þannig að staðarskekkjan uppfyllir \(|\tau_n|\leq c\, h^p\), fyrir öll \(n=1,2,3,\dots\) og \(h\in ]0,h_0]\), þá er aðferðin samleitin og við höfum
\[|e_n|=|x(t_n)-w_n|\leq \dfrac{ch^p}{L_\varphi} \bigg(e^{L_\varphi(t_n-a)}-1\bigg).\]